Módulo lora serie inalámbrico
Chengdu Ebyte Electronic Technology Co.,Ltd. es una empresa de alta tecnología que se especializa en comunicaciones IoT, tiene cientos de productos de desarrollo propio y es reconocida unánimemente por los clientes. Nuestra empresa tiene sólidas capacidades de investigación y desarrollo, con un sistema de servicio posventa perfecto, brindamos a los clientes soluciones integrales y soporte técnico, acortamos el ciclo de investigación y desarrollo, reducimos los costos de investigación y desarrollo y brindamos una plataforma sólida para nuevos desarrollo de productos.
I3C, que significa Circuito Interintegrado Mejorado, es un protocolo de comunicación en serie actualizado basado en el protocolo I2C. Está diseñado para proporcionar interfaces unificadas y eficientes para sensores y otros dispositivos para sistemas complejos modernos. El protocolo I3C no solo hereda las ventajas de I2C, sino que también logra un mayor rendimiento y funciones más ricas al integrar y mejorar los atributos clave de I2C y SPI.
A medida que la cantidad de sensores en los dispositivos móviles continúa aumentando, el protocolo I2C tradicional no ha podido satisfacer las necesidades de transmisión de datos. Para resolver los problemas de la tasa I2C limitada y el alto consumo de energía, ya en 2013, el Grupo de Trabajo de Interfaz de Sensores de la Alianza MIPI comenzó a investigar sobre las actualizaciones de demanda basadas en I2C. Es en este contexto que surgió I3C. Como versión mejorada de I2C, tiene mejoras significativas en potencia y rendimiento, y la velocidad también se ha incrementado a un nivel de velocidad media que puede reemplazar a SPI.
I3C tiene muchas ventajas importantes sobre I2C. En primer lugar, simplifica la complejidad de la interfaz del sensor y crea la necesidad de conectar pines de interrupción, pines de habilitación, etc. al SoC a través de GPIO, lo que reduce los componentes externos y el cableado, y reduce el costo y la complejidad del sistema. En segundo lugar, I3C tiene una mayor velocidad de transferencia de datos y un menor consumo de energía, lo que puede satisfacer las necesidades de los dispositivos móviles modernos de alto rendimiento y bajo consumo de energía. Además, I3C también es compatible con I2C, lo que permite que los dispositivos I2C existentes realicen una transición sin problemas a I3C.
Como interfaz de bus escalable, práctica y controlable basada en la actualización I2C, I3C puede conectar más fácilmente dispositivos periféricos a procesadores de aplicaciones. Su simplicidad, alta integración y rentabilidad lo hacen ampliamente aplicable en cualquier producto móvil como teléfonos inteligentes, dispositivos portátiles y sistemas automotrices. Con el avance continuo de la tecnología y la creciente demanda de aplicaciones, tenemos razones para creer que es cada vez más probable que I3C reemplace las interfaces tradicionales I2C, SPI, UART y otras en el futuro.
Para obtener información más detallada e información del producto, visite nuestro sitio web oficial: https://www.es-ebyte.com
Ethernet y Ethernet industrial
2024年01月04日
Ethernet y Ethernet industrial son dos estándares de comunicación comunes en el campo de las redes informáticas y se han vuelto cada vez más populares, especialmente en términos industriales en la industria manufacturera. A pesar de sus similitudes, existen diferencias significativas en las características y beneficios que ofrecen.
Descripción general de Ethernet
Ethernet se desarrolló por primera vez en la década de 1970 y luego se estandarizó como IEEE 802.3. Pertenece al grupo de productos Red de Área Local (LAN), grupo de IEEE encargado de cubrir la capa física y los estándares de enlace de datos definidos por un grupo de ingenieros del Instituto de Electricidad y Electrónica. Estos estándares no solo describen las reglas para configurar una red Ethernet, sino que también especifican cómo funcionan juntos los distintos elementos de la red.
Ethernet es un sistema de cable estándar global que conecta múltiples computadoras, dispositivos y servidores para formar una única red que permite que todos los dispositivos se comuniquen entre sí. Aunque originalmente era un método de conexión por cable, Ethernet es ahora una de las tecnologías de red más utilizadas en el mundo y tiene la capacidad de expandirse de manera flexible según sea necesario.
Cómo funciona Ethernet industrial
Cuando se utiliza Ethernet, el flujo de datos se divide en partes más cortas, llamadas tramas, y cada trama contiene información específica, como datos de origen y destino. Esta segmentación de datos tiene como objetivo permitir que la red reciba y envíe datos a pedido.
Algunos términos relacionados con la tecnología Ethernet incluyen:
Medios: en la tecnología Ethernet moderna, los medios se refieren al par trenzado o cable de fibra óptica que conecta dispositivos Ethernet y proporciona una ruta para la transmisión de datos.
Segmentación: divida un único medio compartido en varios segmentos.
Nodo: un dispositivo conectado a un dispositivo dividido.
Ethernet estándar puede transmitir datos a velocidades de 10 Mbps a 100 Mbps, mientras que Gigabit Ethernet es el término estándar IEEE 802.3 utilizado para describir la transmisión a 1 Gbps. Inicialmente, Gigabit Ethernet se utilizó principalmente para el transporte de redes troncales y servidores de alto rendimiento o alta capacidad, pero con el tiempo también se volvió adecuado para conexiones de escritorio y computadoras personales.
Descripción general de Ethernet industrial
El nombre Industrial Ethernet ya indica su campo de aplicación, es decir, entornos industriales. Este tipo de Ethernet normalmente requiere conectores y cables más resistentes y, lo que es más importante, una mayor confiabilidad. Para cumplir con requisitos de confiabilidad más altos, Industrial Ethernet utiliza protocolos propietarios junto con Ethernet estándar. Algunos protocolos Ethernet industriales populares incluyen PROFINET, EtherNet/IP, EtherCAT, SERCOS III y POWERLINK.
Cuando se utiliza Industrial Ethernet, las velocidades de transferencia de datos oscilan entre 10 Mbps y 1 Gbps. Sin embargo, 100 Mbps es la velocidad más popular para aplicaciones Ethernet en el sector industrial.
principio de funcionamiento
Los protocolos de Ethernet industrial, como PROFINET y EtherCAT, modifican el estándar Ethernet para garantizar que los datos de fabricación no solo se envíen y reciban correctamente, sino también a tiempo para realizar operaciones específicas. Esta naturaleza en tiempo real es fundamental para aplicaciones en sistemas de control industrial, como plantas embotelladoras que pueden utilizar tecnología de automatización Industrial Ethernet para garantizar que las botellas se llenen como se espera. En este caso, Industrial Ethernet es capaz de detectar un error en el proceso de embotellado y detenerlo automáticamente, evitando pérdidas de tiempo, producto y dinero.
Diferencias entre otra Ethernet y Ethernet industrial
Además de las diferencias antes mencionadas, hay algunos otros aspectos a considerar. Ethernet es más adecuado para entornos de oficina, donde los requisitos para la generación de informes automatizados en tiempo real son relativamente bajos. Office Ethernet está diseñado principalmente para niveles de uso básicos, mientras que Industrial Ethernet es más adecuado para aplicaciones de múltiples niveles y puede soportar condiciones ambientales más duras.
Ethernet industrial es más adecuado para lidiar con el ruido de la fábrica, los requisitos de los procesos de fábrica y los entornos más hostiles, y puede manejar mejor los conflictos de datos en la fábrica. Dentro de la tecnología Industrial Ethernet, los cables y conectores pueden diferir, presentando diseños más duraderos y aptos para entornos hostiles.
Para obtener más información sobre Ethernet, visite:
https://www.es-ebyte.com/Modem-Signalinterfaceconversion-ethernet
La red de área amplia de baja potencia (LPWAN), o red de área amplia de baja potencia, es una tecnología utilizada para la comunicación entre dispositivos y se utiliza ampliamente en aplicaciones de IoT a gran escala debido a su amplia cobertura de red y bajo consumo de energía del terminal. Ha sido ampliamente utilizado. Esta tecnología de comunicación incluye NB-IoT, LoRa, Sigfox y eMTC, entre las cuales NB-IoT y LoRa han atraído mucha atención en los últimos años.
LoRa, o Long Range Radio, es una tecnología de transmisión inalámbrica de larga distancia basada en tecnología de espectro ensanchado y un tipo de tecnología de comunicación de red de área amplia de bajo consumo. Originalmente desarrollado y promovido por la empresa estadounidense Semtech, LoRa proporciona a los usuarios una forma sencilla y eficaz de lograr comunicaciones inalámbricas de larga distancia y de bajo consumo. Actualmente, LoRa opera principalmente en la banda de frecuencia ISM, incluidas las bandas de frecuencia de 433MHz, 868MHz y 915MHz. Como tecnología de comunicación de red de área amplia de bajo consumo, LoRa tiene un rango de radiofrecuencia de comunicación más fuerte y una distancia de transmisión más larga con el mismo consumo de energía, que suele ser de 3 a 5 veces mayor que la tecnología inalámbrica tradicional.
Semtech ha desarrollado un conjunto completo de soluciones de chips de comunicación basadas en tecnología LoRa, incluidos diferentes chips LoRa adecuados para puertas de enlace y dispositivos terminales. Para alentar a otras empresas a participar en el ecosistema LoRa, en marzo de 2015, Semtech cofundó la Alianza LoRa con Actility, Cisco, IBM y otros fabricantes, y lanzaron conjuntamente la especificación LoRaWAN en evolución, promoviendo un estándar global de redes de área amplia compatible. sistema, formando así un extenso ecosistema industrial.
Los principales indicadores técnicos de LoRa incluyen:
Distancia de transmisión: en entornos urbanos, la distancia de transmisión de LoRa suele alcanzar de 2 a 5 kilómetros, y en entornos suburbanos puede alcanzar los 15 kilómetros.
Frecuencia de funcionamiento: LoRa puede funcionar en diferentes bandas de frecuencia ISM, incluidas las bandas de frecuencia de 433 MHz, 470 MHz, 868 MHz y 915 MHz.
Estándares: LoRa adopta estándares como IEEE 802.15.4g y LoRaWAN.
Tecnología de espectro ensanchado: LoRa utiliza tecnología de espectro ensanchado, que es una variante de CSS (Chirp Spread Spectrum), tiene capacidades de corrección de errores directa (FEC) y es una tecnología patentada de Semtech.
Capacidad de red: una puerta de enlace LoRa puede conectar miles de nodos LoRa.
Duración de la batería: Los nodos LoRa tienen una duración de batería de hasta 10 años.
Seguridad: LoRa utiliza cifrado AES128 para garantizar la seguridad de las comunicaciones.
Velocidades de transmisión: LoRa tiene una amplia gama de velocidades de transmisión, desde 18 bits por segundo hasta 62,5 kilobits por segundo.
En general, LoRa, como uno de los representantes de la tecnología LPWAN, la convierte en una poderosa solución para aplicaciones de IoT a través de sus características técnicas únicas, especialmente adecuada para escenarios que requieren comunicación a larga distancia y batería de larga duración.
Ebyte se centra en la industria de las comunicaciones inalámbricas de IoT, siempre presta atención al desarrollo de la industria y la tecnología de comunicaciones de IoT y está a la vanguardia de la tecnología de comunicaciones inalámbricas de IoT. Ebyte ha desarrollado módulos de comunicación inalámbrica fáciles de usar, de alta calidad y asequibles, incluidos módulos Wi-Fi, módulos Bluetooth, módulos Zigbee, módulos NB, módulos 4G, módulos inalámbricos privados, LoRa y LoRaWAN. Espere el módulo.
Para obtener información y productos más detallados, visite nuestro sitio web oficial:
https://www.es-ebyte.com
LoRa, o Long Range Radio, es una tecnología de transmisión inalámbrica de larga distancia basada en tecnología de espectro ensanchado y un tipo de tecnología de comunicación de red de área amplia de bajo consumo. Originalmente desarrollado y promovido por la empresa estadounidense Semtech, LoRa proporciona a los usuarios una forma sencilla y eficaz de lograr comunicaciones inalámbricas de larga distancia y de bajo consumo. Actualmente, LoRa opera principalmente en la banda de frecuencia ISM, incluidas las bandas de frecuencia de 433MHz, 868MHz y 915MHz. Como tecnología de comunicación de red de área amplia de bajo consumo, LoRa tiene un rango de radiofrecuencia de comunicación más fuerte y una distancia de transmisión más larga con el mismo consumo de energía, que suele ser de 3 a 5 veces mayor que la tecnología inalámbrica tradicional.
Semtech ha desarrollado un conjunto completo de soluciones de chips de comunicación basadas en tecnología LoRa, incluidos diferentes chips LoRa adecuados para puertas de enlace y dispositivos terminales. Para alentar a otras empresas a participar en el ecosistema LoRa, en marzo de 2015, Semtech cofundó la Alianza LoRa con Actility, Cisco, IBM y otros fabricantes, y lanzaron conjuntamente la especificación LoRaWAN en evolución, promoviendo un estándar global de redes de área amplia compatible. sistema, formando así un extenso ecosistema industrial.
Los principales indicadores técnicos de LoRa incluyen:
Distancia de transmisión: en entornos urbanos, la distancia de transmisión de LoRa suele alcanzar de 2 a 5 kilómetros, y en entornos suburbanos puede alcanzar los 15 kilómetros.
Frecuencia de funcionamiento: LoRa puede funcionar en diferentes bandas de frecuencia ISM, incluidas las bandas de frecuencia de 433 MHz, 470 MHz, 868 MHz y 915 MHz.
Estándares: LoRa adopta estándares como IEEE 802.15.4g y LoRaWAN.
Tecnología de espectro ensanchado: LoRa utiliza tecnología de espectro ensanchado, que es una variante de CSS (Chirp Spread Spectrum), tiene capacidades de corrección de errores directa (FEC) y es una tecnología patentada de Semtech.
Capacidad de red: una puerta de enlace LoRa puede conectar miles de nodos LoRa.
Duración de la batería: Los nodos LoRa tienen una duración de batería de hasta 10 años.
Seguridad: LoRa utiliza cifrado AES128 para garantizar la seguridad de las comunicaciones.
Velocidades de transmisión: LoRa tiene una amplia gama de velocidades de transmisión, desde 18 bits por segundo hasta 62,5 kilobits por segundo.
En general, LoRa, como uno de los representantes de la tecnología LPWAN, la convierte en una poderosa solución para aplicaciones de IoT a través de sus características técnicas únicas, especialmente adecuada para escenarios que requieren comunicación a larga distancia y batería de larga duración.
Ebyte se centra en la industria de las comunicaciones inalámbricas de IoT, siempre presta atención al desarrollo de la industria y la tecnología de comunicaciones de IoT y está a la vanguardia de la tecnología de comunicaciones inalámbricas de IoT. Ebyte ha desarrollado módulos de comunicación inalámbrica fáciles de usar, de alta calidad y asequibles, incluidos módulos Wi-Fi, módulos Bluetooth, módulos Zigbee, módulos NB, módulos 4G, módulos inalámbricos privados, LoRa y LoRaWAN. Espere el módulo.
Para obtener información y productos más detallados, visite nuestro sitio web oficial:
https://www.es-ebyte.com
Análisis en profundidad de la comunicación UART
2023年10月11日
UART (Receptor/Transmisor Asíncrono Universal) es un protocolo de comunicación en serie de uso común que se usa ampliamente en la comunicación entre microcontroladores o varios dispositivos integrados. Este artículo presentará en detalle los principios básicos, los modos de trabajo, el cálculo de la velocidad en baudios y los métodos de uso comunes de la comunicación UART para ayudar a las personas con ciertas capacidades de desarrollo de microcontroladores a comprender y aplicar mejor la comunicación UART.
01 Mecanismo de comunicación asincrónica de comunicación UART.
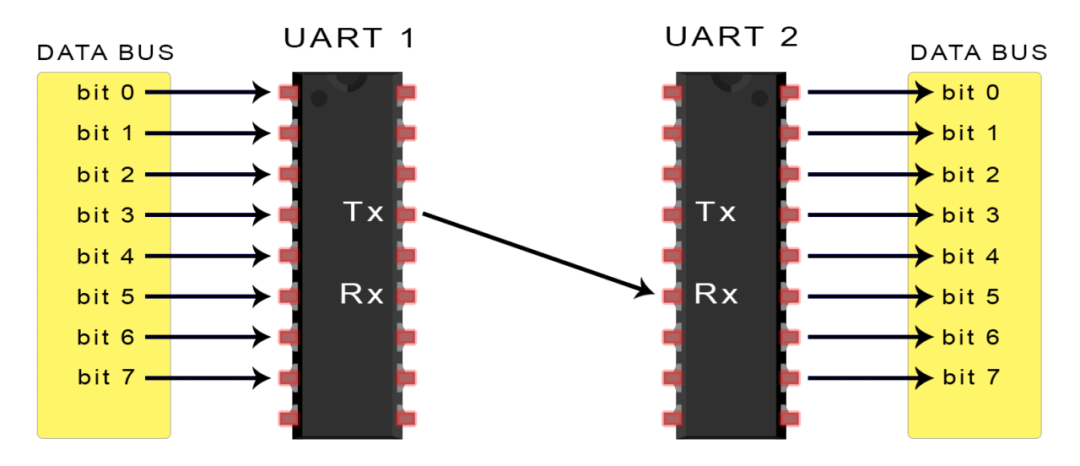
La comunicación UART es un método de comunicación en serie asíncrono y su principio básico es transmitir bits de datos binarios a través de líneas de datos. El sistema de comunicación UART se compone principalmente de dos partes: el extremo emisor y el extremo receptor, y los datos se transmiten entre ellos a través de líneas de datos. El extremo emisor convierte los datos que se enviarán en señales paralelas, luego convierte las señales paralelas en señales en serie a través del circuito impulsor y envía las señales en serie a la línea de datos a través del circuito emisor. El extremo receptor restaura la señal en la línea de datos a una señal paralela a través del circuito receptor y luego convierte la señal paralela en el bit de datos original a través del circuito de decodificación.

La comunicación UART adopta un método de comunicación asíncrona, es decir, la transmisión de datos se realiza a través de líneas de datos entre el extremo emisor y el extremo receptor. En la comunicación asincrónica, no es necesario que el remitente y el receptor estén activos al mismo tiempo, sino que los bits de inicio y parada se utilizan para identificar el inicio y el final de la trama de datos. Específicamente, cuando el extremo emisor genera el bit de inicio, envía un bit de datos; luego espera el bit de inicio del extremo receptor. Si se recibe el bit de inicio, continúa enviando el siguiente bit de datos; si el bit de inicio es no recibido, entonces se considera que la transmisión de la trama de datos falló. De manera similar, cuando el extremo receptor genera un bit de parada, envía un bit de verificación, luego espera el bit de parada del extremo emisor. Si se recibe el bit de parada, la transmisión de la trama de datos se considera exitosa.
02 velocidad de baudios UART
La velocidad en baudios representa el número de bits de datos binarios transmitidos a través de la línea por unidad de tiempo, generalmente expresado en bps (bits por segundo). Por ejemplo, si la velocidad en baudios es de 9600 bps, se pueden transmitir 9600 bits de datos por segundo.
La velocidad en baudios de los datos de transmisión del puerto serie es generada por el sistema de reloj del microcontrolador, por lo que tiene una relación matemática con el reloj del sistema del microcontrolador.
Velocidad de baudios = (16 * frecuencia de reloj) / (32 * tiempo de muestreo) + (1 * frecuencia de reloj) / (32 * tiempo de muestreo) - (1 * frecuencia de reloj) / (64 * tiempo de muestreo)
Entre ellos, el tiempo de muestreo se refiere al intervalo de tiempo desde el último bit de inicio hasta el bit de inicio actual. Por ejemplo, si el tiempo de muestreo es de 10 ns, la velocidad en baudios es de 9600 bps.
Las velocidades de baudios comunes son 2400, 4800, 9600, 19200, 38400, 57600, 115200... Todas son múltiplos enteros de 2400, por lo que se pueden generar diferentes velocidades de baudios a través de divisores de frecuencia. Aunque los microcontroladores actuales tienen diferentes frecuencias, las más comunes son 32 MHz, 48 MHz y 144 MHz. Generalmente tienen un reloj de sistema externo que proporciona una frecuencia de reloj básica (como 1 MHz) para los dispositivos periféricos del microcontrolador. También se genera la velocidad en baudios UART. desde este reloj Generar señal de reloj.
Cabe señalar que en el uso real, la frecuencia del reloj puede verse afectada por algunos factores, como la deriva del oscilador de cristal, el ruido de la fuente de alimentación, etc. Por lo tanto, para garantizar la precisión y confiabilidad de la transmisión de datos, se recomienda utilizar un oscilador de cristal externo o un generador de reloj y calibrarlo y compensarlo al diseñar un sistema de comunicación UART.
03 Bits de parada y comprobación de paridad
En la comunicación asíncrona UART, el bit de parada se utiliza para indicar el final de la trama de datos. El bit de parada puede ser de 1 o 2 bits. Cuando el bit de parada es de 1 bit, se agrega un intervalo de tiempo adicional después de cada byte de datos para compensar los errores causados por la fluctuación del reloj y otros factores. Por ejemplo, si la velocidad en baudios es 9600 bps, el intervalo de tiempo entre cada byte es 4 ms, por lo que el intervalo de tiempo entre cada bit de parada es 4 ms/8 = 0,5 ms.

Cuando el bit de parada es de 2 bits, se agregan dos intervalos de tiempo adicionales después de cada byte de datos, es decir, el intervalo de tiempo para cada byte es 4 ms/(8 + 4) = 0,3125 ms. Este modo es adecuado para escenarios de transmisión de datos que requieren mayor precisión.
La verificación de paridad es un método de detección de errores comúnmente utilizado para detectar errores y pérdidas durante la transmisión de datos. En la comunicación UART, la precisión y confiabilidad de la transmisión de datos se pueden mejorar configurando el bit de paridad.
Cabe señalar que el bit de paridad solo puede detectar errores y pérdidas durante la transmisión de datos, pero no puede garantizar la integridad y corrección de los datos. Por lo tanto, cuando se utiliza la comunicación UART, se deben tomar otras medidas para garantizar la exactitud y confiabilidad de la transmisión de datos.
04 Transceptor de sondeo UART y transceptor de interrupción
Como mencionamos antes, la comunicación UART consiste en dividir un byte de datos en varios bits y luego enviarlos uno por uno. Cuando se envía un byte de datos al transmisor UART, el byte se convierte en bits. Después de que el UART envía este byte, se genera un bit de parada. En este momento, el transmisor UART está inactivo y puede continuar enviando el siguiente byte. . Por lo general, el transmisor UART generará un estado inactivo después de enviar un byte. La transmisión de sondeo consiste en esperar este estado inactivo y enviar el siguiente byte.
Lo mismo ocurre con la recepción UART. Cuando el receptor UART termina de recibir un byte y recibe la señal del bit de parada, guardará los datos recién recibidos en el registro de datos UART del microcontrolador y generará un bit de bandera de recepción. Este byte de datos se puede recibir.
Sin embargo, en los sistemas de microcomputadoras de un solo chip, a menudo hay más que solo aplicaciones de transceptor UART y se deben utilizar transceptores de interrupción. Por lo general, el transceptor UART del microcontrolador tiene una interrupción de recepción de RX y una interrupción de finalización de TX. Al interrumpir la transmisión, el transmisor UART está en estado inactivo. En este momento, el primer byte se escribe en el transmisor. Después de transmitir el byte, se genera una interrupción de finalización de TX. Los bytes posteriores se completan en la función de servicio del TX. interrupción de finalización Y generar la siguiente interrupción, y finalmente hasta que se transmitan todos los bytes que deben transmitirse. Al interrumpir la recepción, el receptor UART generará una interrupción de recepción RX después de recibir un byte. El byte recibido se lee en la función de servicio de interrupción de recepción RX. El byte recibido se lee durante cada interrupción.

05 transceptor UART con caché de datos
En muchos sistemas de microcontroladores, se proporcionan funciones de interfaz como UART Read y UART Write. Algunos microcontroladores avanzados incluso tienen funciones de devolución de llamada, como UART Read Callback y UART Write Callback para enviar y recibir datos. Por lo general, las capacidades de procesamiento de datos de muchos microcontroladores son mucho más rápidas que la comunicación UART, por lo que los sistemas de microcontroladores que utilizan las funciones de interfaz anteriores utilizan la memoria caché de datos para ayudar al transceptor UART. Los métodos comunes de envío y recepción de UART incluyen los siguientes:
Envío y recepción de cola de datos (Cola)
Este método es adecuado para la mayoría de los microcontroladores, siempre que haya interrupciones. Cuando se utiliza UART Write para enviar datos, los datos no se escriben directamente en el transmisor UART, sino que se colocan en un búfer de anillo. Luego lea el búfer de anillo en la función de servicio de interrupción completa de transmisión UART TX y envíe el byte leído al transmisor UART, y luego espere a que se ejecute nuevamente la función de servicio de interrupción de finalización de transmisión TX para enviar el siguiente byte hasta que el búfer de anillo esté hasta Se envían los datos del área. Un búfer de anillo generalmente tiene una variable que marca la cabeza y la cola, siempre que los valores de las variables de la cabeza y la cola no sean iguales, significa que el búfer tiene datos. Cuando se utiliza UART Read para recibir datos, los datos no se obtienen directamente del receptor UART, sino del búfer en anillo. En la función de servicio de interrupción UART RX, los bytes recibidos por el receptor UART se envían al búfer de anillo. Los datos obtenidos cuando el microcontrolador ejecuta la lectura UART son los datos en el búfer de anillo. Esto garantiza que el programa del microcontrolador no tenga que esperar. para el receptor UART. .
La ventaja de este diseño es que puede procesar eficazmente datos en tiempo real y evitar la pérdida de datos. Sin embargo, si el tamaño de la cola no se establece correctamente, es posible que se produzca un desbordamiento de datos. Por lo tanto, debemos establecer el tamaño de la cola de manera razonable de acuerdo con el escenario de la aplicación real.
Transceptor UART con hardware FIFO
Muchos microcontroladores avanzados utilizan hardware FIFO para el transceptor UART. Un microcontrolador sin hardware FIFO ejecutará una función de interrupción cada vez que envíe y reciba datos. Cuando se comunica a una alta velocidad de baudios, el microcontrolador ingresará interrupciones con frecuencia, lo que afectará el procesamiento de la tarea principal del microcontrolador. El hardware FIFO puede aliviar esta contradicción. Por ejemplo, el UART FIFO de una microcomputadora de un solo chip es de 16 bytes. Al enviar datos, la computadora de un solo chip puede transmitir hasta 16 bytes de datos a la vez. La interrupción de finalización de la transmisión UART TX no se generará hasta el 16 Se envían datos de bytes. Al recibir datos, generalmente hay interrupciones "medio llenas" e interrupciones de "tiempo de espera", es decir, el número de bytes en el FIFO de recepción excede los 8 bytes, o el FIFO de recepción no está vacío pero no se reciben nuevos bytes por más de 1 byte de datos, generando una interrupción de recepción UART RX. Por lo general, se utiliza UART con hardware FIFO en combinación con una cola de datos, y la eficiencia de transmisión es mayor en comunicaciones de alta velocidad de baudios.
Transceptor UART con DMA
DMA (Acceso directo a la memoria) es una tecnología que puede asignar directamente un área de almacenamiento determinada de la computadora al espacio de direcciones de la memoria, logrando así un acceso unificado a la memoria y otros periféricos. Cuando la UART recibe datos, los datos se escribirán directamente en el área de memoria controlada por DMA y luego activarán una interrupción. En la rutina del servicio de interrupción, podemos recuperar los datos del área de memoria controlada por DMA, realizar el procesamiento necesario y luego enviarlos a través de UART.
El uso de DMA para la transmisión UART es particularmente útil para transmitir múltiples datos consecutivos, como las funciones de devolución de llamada de lectura UART y devolución de llamada de escritura UART mencionadas anteriormente. Al enviar múltiples flujos de datos continuamente, los flujos de datos se pueden colocar en varios búferes diferentes del microcontrolador, y luego el DMA apunta directamente a la dirección del búfer. Una vez completada la transmisión del DMA, se genera una devolución de llamada de escritura UART y luego el DMA apunta hacia abajo en la devolución de llamada de escritura UART.Una dirección de búfer. Al recibir datos, también puede reservar un búfer de recepción. Los datos transferidos por DMA se transfieren al búfer. Cuando la transferencia está llena, se genera una devolución de llamada de lectura UART y apunta al siguiente búfer de recepción. Al mismo tiempo, el microcontrolador El programa principal puede procesar el contenido del área del buffer que ha recibido datos completos.
Este artículo presenta en detalle los principios básicos de la comunicación UART, el cálculo de la velocidad en baudios, el modo de trabajo y los métodos de uso comunes, ayudando a las personas con ciertas capacidades de desarrollo de microcontroladores a comprender y aplicar mejor la comunicación UART. Dominar la tecnología de comunicación UART puede aportar una gran comodidad al diseño y aplicación de sistemas de control de microcontroladores.
Fabricante de módulos inalámbricos de China, comunicación inalámbrica de baja potencia
Como fabricante chino de módulos inalámbricos y fábrica de módulos inalámbricos, Chengdu Yibit Electronic Technology Co., Ltd. es una empresa de alta tecnología que integra investigación y desarrollo, producción y ventas, con una cadena industrial completa y que se centra en aplicaciones de comunicación de Internet de las cosas. Los productos de comunicación inalámbrica de bajo consumo cubren LoRa, WiFi, Bluetooth, ZigBee, SPI/SOC/UART (comunicación en serie), etc. Para hacer realidad las necesidades e ideales de su proyecto de Internet de las cosas, creemos que le ofrecemos más que solo tecnología inalámbrica. Los módulos y soluciones de comunicación inalámbrica también son nuestros sinceros socios y amigos. Si desea conocer más información actualizada y de actualidad, siga la plataforma oficial de EBYTE: http://www.es-ebyte.com
01 Mecanismo de comunicación asincrónica de comunicación UART.
La comunicación UART es un método de comunicación en serie asíncrono y su principio básico es transmitir bits de datos binarios a través de líneas de datos. El sistema de comunicación UART se compone principalmente de dos partes: el extremo emisor y el extremo receptor, y los datos se transmiten entre ellos a través de líneas de datos. El extremo emisor convierte los datos que se enviarán en señales paralelas, luego convierte las señales paralelas en señales en serie a través del circuito impulsor y envía las señales en serie a la línea de datos a través del circuito emisor. El extremo receptor restaura la señal en la línea de datos a una señal paralela a través del circuito receptor y luego convierte la señal paralela en el bit de datos original a través del circuito de decodificación.

La comunicación UART adopta un método de comunicación asíncrona, es decir, la transmisión de datos se realiza a través de líneas de datos entre el extremo emisor y el extremo receptor. En la comunicación asincrónica, no es necesario que el remitente y el receptor estén activos al mismo tiempo, sino que los bits de inicio y parada se utilizan para identificar el inicio y el final de la trama de datos. Específicamente, cuando el extremo emisor genera el bit de inicio, envía un bit de datos; luego espera el bit de inicio del extremo receptor. Si se recibe el bit de inicio, continúa enviando el siguiente bit de datos; si el bit de inicio es no recibido, entonces se considera que la transmisión de la trama de datos falló. De manera similar, cuando el extremo receptor genera un bit de parada, envía un bit de verificación, luego espera el bit de parada del extremo emisor. Si se recibe el bit de parada, la transmisión de la trama de datos se considera exitosa.

02 velocidad de baudios UART
La velocidad en baudios representa el número de bits de datos binarios transmitidos a través de la línea por unidad de tiempo, generalmente expresado en bps (bits por segundo). Por ejemplo, si la velocidad en baudios es de 9600 bps, se pueden transmitir 9600 bits de datos por segundo.
La velocidad en baudios de los datos de transmisión del puerto serie es generada por el sistema de reloj del microcontrolador, por lo que tiene una relación matemática con el reloj del sistema del microcontrolador.
Velocidad de baudios = (16 * frecuencia de reloj) / (32 * tiempo de muestreo) + (1 * frecuencia de reloj) / (32 * tiempo de muestreo) - (1 * frecuencia de reloj) / (64 * tiempo de muestreo)
Entre ellos, el tiempo de muestreo se refiere al intervalo de tiempo desde el último bit de inicio hasta el bit de inicio actual. Por ejemplo, si el tiempo de muestreo es de 10 ns, la velocidad en baudios es de 9600 bps.
Las velocidades de baudios comunes son 2400, 4800, 9600, 19200, 38400, 57600, 115200... Todas son múltiplos enteros de 2400, por lo que se pueden generar diferentes velocidades de baudios a través de divisores de frecuencia. Aunque los microcontroladores actuales tienen diferentes frecuencias, las más comunes son 32 MHz, 48 MHz y 144 MHz. Generalmente tienen un reloj de sistema externo que proporciona una frecuencia de reloj básica (como 1 MHz) para los dispositivos periféricos del microcontrolador. También se genera la velocidad en baudios UART. desde este reloj Generar señal de reloj.
Cabe señalar que en el uso real, la frecuencia del reloj puede verse afectada por algunos factores, como la deriva del oscilador de cristal, el ruido de la fuente de alimentación, etc. Por lo tanto, para garantizar la precisión y confiabilidad de la transmisión de datos, se recomienda utilizar un oscilador de cristal externo o un generador de reloj y calibrarlo y compensarlo al diseñar un sistema de comunicación UART.
03 Bits de parada y comprobación de paridad
En la comunicación asíncrona UART, el bit de parada se utiliza para indicar el final de la trama de datos. El bit de parada puede ser de 1 o 2 bits. Cuando el bit de parada es de 1 bit, se agrega un intervalo de tiempo adicional después de cada byte de datos para compensar los errores causados por la fluctuación del reloj y otros factores. Por ejemplo, si la velocidad en baudios es 9600 bps, el intervalo de tiempo entre cada byte es 4 ms, por lo que el intervalo de tiempo entre cada bit de parada es 4 ms/8 = 0,5 ms.

Cuando el bit de parada es de 2 bits, se agregan dos intervalos de tiempo adicionales después de cada byte de datos, es decir, el intervalo de tiempo para cada byte es 4 ms/(8 + 4) = 0,3125 ms. Este modo es adecuado para escenarios de transmisión de datos que requieren mayor precisión.
La verificación de paridad es un método de detección de errores comúnmente utilizado para detectar errores y pérdidas durante la transmisión de datos. En la comunicación UART, la precisión y confiabilidad de la transmisión de datos se pueden mejorar configurando el bit de paridad.
Cabe señalar que el bit de paridad solo puede detectar errores y pérdidas durante la transmisión de datos, pero no puede garantizar la integridad y corrección de los datos. Por lo tanto, cuando se utiliza la comunicación UART, se deben tomar otras medidas para garantizar la exactitud y confiabilidad de la transmisión de datos.
04 Transceptor de sondeo UART y transceptor de interrupción
Como mencionamos antes, la comunicación UART consiste en dividir un byte de datos en varios bits y luego enviarlos uno por uno. Cuando se envía un byte de datos al transmisor UART, el byte se convierte en bits. Después de que el UART envía este byte, se genera un bit de parada. En este momento, el transmisor UART está inactivo y puede continuar enviando el siguiente byte. . Por lo general, el transmisor UART generará un estado inactivo después de enviar un byte. La transmisión de sondeo consiste en esperar este estado inactivo y enviar el siguiente byte.
Lo mismo ocurre con la recepción UART. Cuando el receptor UART termina de recibir un byte y recibe la señal del bit de parada, guardará los datos recién recibidos en el registro de datos UART del microcontrolador y generará un bit de bandera de recepción. Este byte de datos se puede recibir.
Sin embargo, en los sistemas de microcomputadoras de un solo chip, a menudo hay más que solo aplicaciones de transceptor UART y se deben utilizar transceptores de interrupción. Por lo general, el transceptor UART del microcontrolador tiene una interrupción de recepción de RX y una interrupción de finalización de TX. Al interrumpir la transmisión, el transmisor UART está en estado inactivo. En este momento, el primer byte se escribe en el transmisor. Después de transmitir el byte, se genera una interrupción de finalización de TX. Los bytes posteriores se completan en la función de servicio del TX. interrupción de finalización Y generar la siguiente interrupción, y finalmente hasta que se transmitan todos los bytes que deben transmitirse. Al interrumpir la recepción, el receptor UART generará una interrupción de recepción RX después de recibir un byte. El byte recibido se lee en la función de servicio de interrupción de recepción RX. El byte recibido se lee durante cada interrupción.

05 transceptor UART con caché de datos
En muchos sistemas de microcontroladores, se proporcionan funciones de interfaz como UART Read y UART Write. Algunos microcontroladores avanzados incluso tienen funciones de devolución de llamada, como UART Read Callback y UART Write Callback para enviar y recibir datos. Por lo general, las capacidades de procesamiento de datos de muchos microcontroladores son mucho más rápidas que la comunicación UART, por lo que los sistemas de microcontroladores que utilizan las funciones de interfaz anteriores utilizan la memoria caché de datos para ayudar al transceptor UART. Los métodos comunes de envío y recepción de UART incluyen los siguientes:
Envío y recepción de cola de datos (Cola)
Este método es adecuado para la mayoría de los microcontroladores, siempre que haya interrupciones. Cuando se utiliza UART Write para enviar datos, los datos no se escriben directamente en el transmisor UART, sino que se colocan en un búfer de anillo. Luego lea el búfer de anillo en la función de servicio de interrupción completa de transmisión UART TX y envíe el byte leído al transmisor UART, y luego espere a que se ejecute nuevamente la función de servicio de interrupción de finalización de transmisión TX para enviar el siguiente byte hasta que el búfer de anillo esté hasta Se envían los datos del área. Un búfer de anillo generalmente tiene una variable que marca la cabeza y la cola, siempre que los valores de las variables de la cabeza y la cola no sean iguales, significa que el búfer tiene datos. Cuando se utiliza UART Read para recibir datos, los datos no se obtienen directamente del receptor UART, sino del búfer en anillo. En la función de servicio de interrupción UART RX, los bytes recibidos por el receptor UART se envían al búfer de anillo. Los datos obtenidos cuando el microcontrolador ejecuta la lectura UART son los datos en el búfer de anillo. Esto garantiza que el programa del microcontrolador no tenga que esperar. para el receptor UART. .
La ventaja de este diseño es que puede procesar eficazmente datos en tiempo real y evitar la pérdida de datos. Sin embargo, si el tamaño de la cola no se establece correctamente, es posible que se produzca un desbordamiento de datos. Por lo tanto, debemos establecer el tamaño de la cola de manera razonable de acuerdo con el escenario de la aplicación real.
Transceptor UART con hardware FIFO
Muchos microcontroladores avanzados utilizan hardware FIFO para el transceptor UART. Un microcontrolador sin hardware FIFO ejecutará una función de interrupción cada vez que envíe y reciba datos. Cuando se comunica a una alta velocidad de baudios, el microcontrolador ingresará interrupciones con frecuencia, lo que afectará el procesamiento de la tarea principal del microcontrolador. El hardware FIFO puede aliviar esta contradicción. Por ejemplo, el UART FIFO de una microcomputadora de un solo chip es de 16 bytes. Al enviar datos, la computadora de un solo chip puede transmitir hasta 16 bytes de datos a la vez. La interrupción de finalización de la transmisión UART TX no se generará hasta el 16 Se envían datos de bytes. Al recibir datos, generalmente hay interrupciones "medio llenas" e interrupciones de "tiempo de espera", es decir, el número de bytes en el FIFO de recepción excede los 8 bytes, o el FIFO de recepción no está vacío pero no se reciben nuevos bytes por más de 1 byte de datos, generando una interrupción de recepción UART RX. Por lo general, se utiliza UART con hardware FIFO en combinación con una cola de datos, y la eficiencia de transmisión es mayor en comunicaciones de alta velocidad de baudios.
Transceptor UART con DMA
DMA (Acceso directo a la memoria) es una tecnología que puede asignar directamente un área de almacenamiento determinada de la computadora al espacio de direcciones de la memoria, logrando así un acceso unificado a la memoria y otros periféricos. Cuando la UART recibe datos, los datos se escribirán directamente en el área de memoria controlada por DMA y luego activarán una interrupción. En la rutina del servicio de interrupción, podemos recuperar los datos del área de memoria controlada por DMA, realizar el procesamiento necesario y luego enviarlos a través de UART.
El uso de DMA para la transmisión UART es particularmente útil para transmitir múltiples datos consecutivos, como las funciones de devolución de llamada de lectura UART y devolución de llamada de escritura UART mencionadas anteriormente. Al enviar múltiples flujos de datos continuamente, los flujos de datos se pueden colocar en varios búferes diferentes del microcontrolador, y luego el DMA apunta directamente a la dirección del búfer. Una vez completada la transmisión del DMA, se genera una devolución de llamada de escritura UART y luego el DMA apunta hacia abajo en la devolución de llamada de escritura UART.Una dirección de búfer. Al recibir datos, también puede reservar un búfer de recepción. Los datos transferidos por DMA se transfieren al búfer. Cuando la transferencia está llena, se genera una devolución de llamada de lectura UART y apunta al siguiente búfer de recepción. Al mismo tiempo, el microcontrolador El programa principal puede procesar el contenido del área del buffer que ha recibido datos completos.
Este artículo presenta en detalle los principios básicos de la comunicación UART, el cálculo de la velocidad en baudios, el modo de trabajo y los métodos de uso comunes, ayudando a las personas con ciertas capacidades de desarrollo de microcontroladores a comprender y aplicar mejor la comunicación UART. Dominar la tecnología de comunicación UART puede aportar una gran comodidad al diseño y aplicación de sistemas de control de microcontroladores.
Fabricante de módulos inalámbricos de China, comunicación inalámbrica de baja potencia
Como fabricante chino de módulos inalámbricos y fábrica de módulos inalámbricos, Chengdu Yibit Electronic Technology Co., Ltd. es una empresa de alta tecnología que integra investigación y desarrollo, producción y ventas, con una cadena industrial completa y que se centra en aplicaciones de comunicación de Internet de las cosas. Los productos de comunicación inalámbrica de bajo consumo cubren LoRa, WiFi, Bluetooth, ZigBee, SPI/SOC/UART (comunicación en serie), etc. Para hacer realidad las necesidades e ideales de su proyecto de Internet de las cosas, creemos que le ofrecemos más que solo tecnología inalámbrica. Los módulos y soluciones de comunicación inalámbrica también son nuestros sinceros socios y amigos. Si desea conocer más información actualizada y de actualidad, siga la plataforma oficial de EBYTE: http://www.es-ebyte.com
Matter は ZigBee の代わりになるでしょうか?
2023年06月28日
Matter は ZigBee の ZCL から派生したもので、Matter には ZigBee Alliance のプラットフォームもあります。そのため、Matter は ZigBee の代わりになるのでしょうか? 答えはいいえだ。
まず、Matterは表面上のWIFIと低電力デバイスを接続できるようですが、MatterはIEEE802.15.4とIEEE802.11のブリッジデバイス、つまり「エッジゲートウェイ」を必要とするため、Matterは依然として依存する必要がありますゲートウェイ上で。
第二に、Matter デバイスがネットワークに接続されるとき、デバイス側で人間とコンピュータの対話が必要になります。そのため、多くの Matter チップは ZigBee と BLE のデュアルモード チップです。接続するときは BLE を使用してセットアップし、接続後は、 ZigBee と同じ IEEE802 15.4 モードに切り替えます。
また、MatterはIPv6をベースとしているため、チップ上のプロトコルスタックのリソース消費がZigBeeに比べてはるかに大きく、チップのコストはチップ数の分だけ削減できるものの、ソフトウェアの開発コストやソフトウェアの保守コストが増加します。 Matter も ZigBee よりも上位です。
写真
実際、Matter は ZigBee に代わるものではなく、ZigBee を補完することを目的としています。 現在、Matter のバージョン 1.0 のみがリリースされていますが、これは ZigBee 3.0 よりも成熟度も信頼性もはるかに劣っています。 また、Matter は将来的に ZigBee と下位互換性があり、Matter は ZigBee と同じ IEEE802.15.4 プロトコルを使用しており、Matter も ZCL から派生しているため、将来的には ZigBee と Matter の間にブリッジデバイスが存在する可能性があります。
EBYTE は、モノのインターネット アプリケーションの専門家になることに尽力しています。 また、チップ製造業界で多くの発明特許を取得しています。 より新鮮で人気のある情報を知りたい場合は、次の EBYTE の公式プラットフォームに注目してください:http://www.es-ebyte.com
まず、Matterは表面上のWIFIと低電力デバイスを接続できるようですが、MatterはIEEE802.15.4とIEEE802.11のブリッジデバイス、つまり「エッジゲートウェイ」を必要とするため、Matterは依然として依存する必要がありますゲートウェイ上で。
第二に、Matter デバイスがネットワークに接続されるとき、デバイス側で人間とコンピュータの対話が必要になります。そのため、多くの Matter チップは ZigBee と BLE のデュアルモード チップです。接続するときは BLE を使用してセットアップし、接続後は、 ZigBee と同じ IEEE802 15.4 モードに切り替えます。
また、MatterはIPv6をベースとしているため、チップ上のプロトコルスタックのリソース消費がZigBeeに比べてはるかに大きく、チップのコストはチップ数の分だけ削減できるものの、ソフトウェアの開発コストやソフトウェアの保守コストが増加します。 Matter も ZigBee よりも上位です。
写真
実際、Matter は ZigBee に代わるものではなく、ZigBee を補完することを目的としています。 現在、Matter のバージョン 1.0 のみがリリースされていますが、これは ZigBee 3.0 よりも成熟度も信頼性もはるかに劣っています。 また、Matter は将来的に ZigBee と下位互換性があり、Matter は ZigBee と同じ IEEE802.15.4 プロトコルを使用しており、Matter も ZCL から派生しているため、将来的には ZigBee と Matter の間にブリッジデバイスが存在する可能性があります。
EBYTE は、モノのインターネット アプリケーションの専門家になることに尽力しています。 また、チップ製造業界で多くの発明特許を取得しています。 より新鮮で人気のある情報を知りたい場合は、次の EBYTE の公式プラットフォームに注目してください:http://www.es-ebyte.com
Modbusゲートウェイとは何ですか
2023年06月28日
Modbus ゲートウェイは、Modbus プロトコル フレームを他のプロトコル フレームに変換します。
たとえば、Modbus RTU と Modbus TCP のデータを相互に変換したり、ホスト リクエストとスレーブ レスポンスをアプリケーション開発用に開発して、プロトコル変換の効率を向上させることもできます。 -host 要求により、マルチホスト要求応答の効率が向上します。ストレージ ゲートウェイは、ホストによって開始された Modbus 要求のアクティブなレポートを置き換えます。
デバイスは、Modbus 変換効率を確保し、シリアル バスへの干渉を防ぐために非 Modbus データを破棄するために Modbus ゲートウェイ モードになっています。
いくつかの一般的な Modbus ゲートウェイ
以下で説明する Modbus ゲートウェイは、Modbus RTU から Modbus TCP への変換を指しますが、Modbus ASCII データ フレームの処理は含まれません。Modbus ASCII は透過的な送信のみをサポートします。
01
単純なプロトコル変換
最も従来的かつ一般的な Modbus ゲートウェイ機能であるシンプル プロトコル変換は、データ処理に最も効率的な Modbus ゲートウェイ モードです。データ内のキー フィールドのみを抽出し、抽出されたデータを別のプロトコル (Modbus RTUßàModbus TCP) でエンコードして送信します。
02
マルチホストゲートウェイ
マルチホスト ゲートウェイは TCP サーバー モードでのみ動作し、複数の Modbus TCP ホスト リクエストを同時に処理できます。シリアル ポート サーバーは、1 つのホスト リクエストが完了していないときに他のホスト リクエストを受信します。このとき、シリアル ポートはサーバーは RS485 バス上で実行します アービトレーション出力 (平たく言えば、後続の命令をブロックします)
03
ストレージゲートウェイ
最初に理解しておくべきことは、シリアル ポートの通信速度はネットワーク ポートの通信速度よりもはるかに遅いということです。ホストが RTU デバイスを要求するとき、通常、ホストはいくつかのレジスタのみを処理します。この動作には「ストレージ ゲートウェイ」が使用されます。環境。
04
構成可能なゲートウェイ
「ストレージ」ゲートウェイの最初のコマンドの応答が遅いという問題を解決するには、構成ゲートウェイを使用できます。 コンフィギュレーションゲートウェイも、事前に「ストレージ」ゲートウェイに問い合わせることにより、RS485バス子局のレジスタ内容を取得する方法を採用しています。 最初の命令の戻りが遅いという問題を解決するには、必要なレジスタ リストを事前にゲートウェイ内に設定する必要があります。
EBYTE は、モノのインターネット アプリケーションの専門家になることに尽力しています。 また、チップ製造業界で多くの発明特許を取得しています。 より新鮮で人気のある情報を知りたい場合は、次の EBYTE の公式プラットフォームに注目してください:http://www.es-ebyte.com
光通信の歴史
2023年06月26日
1. 光通信とは何ですか?
光通信は、情報の伝達に光信号を使用する通信方式です。 高速、大容量、低損失、強力な耐干渉性を備えた通信方式であり、現代の通信分野において重要な技術の一つとなっています。 光通信では、光源が情報を光信号に変換し、光ファイバーを通じて送信し、受信側で光信号を電気信号に変換して復号化します。 光通信は、電気通信、インターネット、データセンター、医療、ラジオ、テレビなどの分野で広く使用されています。 技術の絶え間ない進歩により、光通信の伝送速度と容量は継続的に向上し、人々の生活や仕事にさらなる利便性をもたらしています。
2. 光通信の発展の歴史
1960 年代に光通信が発展し始め、その後数十年間で急速に発展しました。 以下は、光通信の主要な歴史的ノードです。
1960 年代: 光通信の開発は 1960 年代に始まり、当初は空中のレーザー ビームを介したポイントツーポイント通信でした。
1970年代初頭、長距離電話通信に光通信が使われ始めましたが、光ファイバー材料の製造や光源技術の進歩には依然として大きな困難がありました。
1980 年代、光通信は急速な発展期に入りました。 光ファイバー材料の製造と光源技術の継続的な改善により、光通信の伝送速度と伝送距離は大幅に向上しました。
1990年代、光通信技術は広く普及し、特にインターネットの発展に重要な役割を果たしました。 1997 年、世界の光通信市場の価値は 100 億ドルを超えました。
2000年代に入ると、波長の異なる複数の光信号を1本の光ファイバで同時に伝送できる波長分割多重(WDM)技術など、光通信技術が伝送速度と伝送距離をさらに向上させ、伝送容量と伝送効率が大幅に向上しました。光ファイバ。
2010年代、光通信技術は現代の通信分野に欠かせないものとなり、電話、ブロードバンド、移動体通信などの分野で広く利用されています。 同時に、光通信技術はスマートホーム、スマート交通、スマートホームなどの分野でも活用され始めています。
3. 光通信原理:
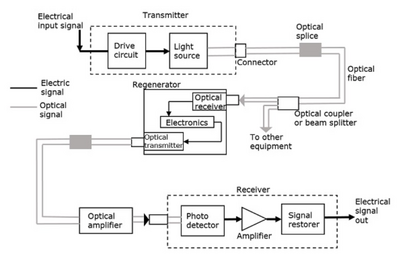
光通信は、光の伝送特性を利用して、情報を光信号に変換し、光ファイバーを通して伝送し、光信号を電気信号に変換して解読します。 光通信の主要機器には、光源、光ファイバー、光受信機などが含まれます。 光源にはレーザーや発光ダイオードなどが使用され、電気信号により光源のスイッチや光の強度が制御されて光パルス信号が生成される。 これらの信号は光ファイバーを介して伝送され、受信端に到達し、光受信器を介して光信号を電気信号に変換します。
4. 光通信アプリケーションのシナリオ:
電気通信分野:光通信技術は電気通信分野における重要な技術の一つとなっており、電話、ブロードバンド、移動体通信などの分野で広く利用されています。
データセンター:データセンターでは高速・大容量のデータ伝送が求められますが、光通信技術はこれに応え、データ伝送速度と大容量化を実現します。
医療分野:光通信技術は医療の診断や治療に使用でき、光干渉断層計(OCT)技術は眼科、皮膚科などの診断に使用できます。
ラジオおよびテレビ分野: 光通信技術は、ラジオやテレビなどの分野での信号伝送に使用され、信号伝送の品質と安定性を向上させることができます。
軍事分野: 光通信技術は軍事通信、レーダー、レーザー誘導などの分野で使用できます。
産業制御分野:光通信技術は産業オートメーションやインテリジェント制御分野で活用できます。
EBYTE は、モノのインターネット アプリケーションの専門家になることに尽力しています。 また、チップ製造業界で多くの発明特許を取得しています。 より新鮮で人気のある情報を知りたい場合は、次の EBYTE の公式プラットフォームに注目してください:http://www.es-ebyte.com
光通信は、情報の伝達に光信号を使用する通信方式です。 高速、大容量、低損失、強力な耐干渉性を備えた通信方式であり、現代の通信分野において重要な技術の一つとなっています。 光通信では、光源が情報を光信号に変換し、光ファイバーを通じて送信し、受信側で光信号を電気信号に変換して復号化します。 光通信は、電気通信、インターネット、データセンター、医療、ラジオ、テレビなどの分野で広く使用されています。 技術の絶え間ない進歩により、光通信の伝送速度と容量は継続的に向上し、人々の生活や仕事にさらなる利便性をもたらしています。

2. 光通信の発展の歴史
1960 年代に光通信が発展し始め、その後数十年間で急速に発展しました。 以下は、光通信の主要な歴史的ノードです。
1960 年代: 光通信の開発は 1960 年代に始まり、当初は空中のレーザー ビームを介したポイントツーポイント通信でした。
1970年代初頭、長距離電話通信に光通信が使われ始めましたが、光ファイバー材料の製造や光源技術の進歩には依然として大きな困難がありました。
1980 年代、光通信は急速な発展期に入りました。 光ファイバー材料の製造と光源技術の継続的な改善により、光通信の伝送速度と伝送距離は大幅に向上しました。
1990年代、光通信技術は広く普及し、特にインターネットの発展に重要な役割を果たしました。 1997 年、世界の光通信市場の価値は 100 億ドルを超えました。
2000年代に入ると、波長の異なる複数の光信号を1本の光ファイバで同時に伝送できる波長分割多重(WDM)技術など、光通信技術が伝送速度と伝送距離をさらに向上させ、伝送容量と伝送効率が大幅に向上しました。光ファイバ。
2010年代、光通信技術は現代の通信分野に欠かせないものとなり、電話、ブロードバンド、移動体通信などの分野で広く利用されています。 同時に、光通信技術はスマートホーム、スマート交通、スマートホームなどの分野でも活用され始めています。
3. 光通信原理:
光通信は、光の伝送特性を利用して、情報を光信号に変換し、光ファイバーを通して伝送し、光信号を電気信号に変換して解読します。 光通信の主要機器には、光源、光ファイバー、光受信機などが含まれます。 光源にはレーザーや発光ダイオードなどが使用され、電気信号により光源のスイッチや光の強度が制御されて光パルス信号が生成される。 これらの信号は光ファイバーを介して伝送され、受信端に到達し、光受信器を介して光信号を電気信号に変換します。

4. 光通信アプリケーションのシナリオ:
電気通信分野:光通信技術は電気通信分野における重要な技術の一つとなっており、電話、ブロードバンド、移動体通信などの分野で広く利用されています。
データセンター:データセンターでは高速・大容量のデータ伝送が求められますが、光通信技術はこれに応え、データ伝送速度と大容量化を実現します。
医療分野:光通信技術は医療の診断や治療に使用でき、光干渉断層計(OCT)技術は眼科、皮膚科などの診断に使用できます。
ラジオおよびテレビ分野: 光通信技術は、ラジオやテレビなどの分野での信号伝送に使用され、信号伝送の品質と安定性を向上させることができます。
軍事分野: 光通信技術は軍事通信、レーダー、レーザー誘導などの分野で使用できます。
産業制御分野:光通信技術は産業オートメーションやインテリジェント制御分野で活用できます。
EBYTE は、モノのインターネット アプリケーションの専門家になることに尽力しています。 また、チップ製造業界で多くの発明特許を取得しています。 より新鮮で人気のある情報を知りたい場合は、次の EBYTE の公式プラットフォームに注目してください:http://www.es-ebyte.com
周波数変換技術
2023年06月19日
周波数変換技術は、電気信号の周波数を変更することで、モーター、コンプレッサー、その他の電気機器の動作速度を調整します。 実用化において、周波数変換器は周波数変換技術の中核デバイスであり、パルス幅変調(PWM)技術と正弦波パルス幅変調(SPWM)技術は周波数変換器制御を実現する重要な手段です。
まず、PWM 変調技術を見てみましょう。 PWM変調技術は、パルス信号の幅を制御することで出力電圧の調整を実現します。 周波数変換技術では、PWM はモーターの速度とトルク出力を制御する周波数コンバーターで広く使用されています。 パルス信号のデューティ比(パルス幅と周期の比)を変更することで、モーターを正確に制御できます。 出力電圧を上げる必要がある場合はパルス信号の幅を広げ、出力電圧を下げる必要がある場合はパルス信号の幅を狭くします。 このようにして、モーターはさまざまな負荷条件下でも安定した速度とトルク出力を維持できます。 同時に、PWM変調技術は高速応答、高制御精度、高効率という利点もあり、さまざまな電力制御システムに広く使用されています。 PWM 変調波形を図 1 に示します。
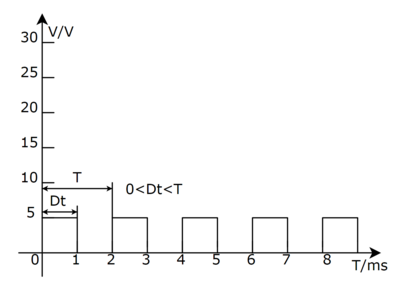
図1 PWM変調波形
PWM テクノロジーには次の利点があります。
効率:PWM技術はパルス幅を調整することでモーターの出力電圧と周波数を制御できるため、さまざまな負荷条件下でもモーターの高効率動作を実現できます。 PWM テクノロジーは、モーターの定格電圧を下げることにより、モーターの消費電力を削減し、全体の効率を向上させることができます。
正確な制御:PWMテクノロジーは、高速応答と高い制御精度の特徴を持っています。 パルス幅と周期を微調整することで、さまざまなアプリケーションのニーズを満たすモーター速度とトルクの正確な調整を実現できます。
機械的衝撃の軽減: PWM テクノロジーはモーターのソフトスタートとソフトストップを実現し、機械システムの衝撃と摩耗を軽減し、機器の耐用年数を延ばします。
PWM テクノロジーには多くの利点がありますが、いくつかの制限があります。
高調波の問題: PWM テクノロジーでは、パルス信号を生成するときに高調波成分が発生し、電力ネットワークやその他の機器に干渉を引き起こす可能性があります。 高調波を低減するには、フィルタリングと抑制措置を講じる必要があり、システムの複雑さとコストが増加します。
スイッチング損失: PWM テクノロジーでは高周波スイッチング デバイスが使用されており、スイッチが頻繁に動作するとスイッチング損失が発生します。 これらの損失は熱エネルギーに変換されるため、回路を冷却するには適切な冷却システムが必要です。
EMI 干渉: 高周波スイッチング動作により、PWM テクノロジーは電磁干渉 (EMI) を生成し、周囲の電子機器や無線通信システムに干渉を引き起こす可能性があります。
もう 1 つの一般的な変調技術は SPWM 変調技術です。 SPWM 変調技術は、三角波と、必要な出力正弦波に類似した基準正弦波を生成することにより、電圧の変調を実現します。 周波数コンバータでは、SPWM 変調技術は、モータの速度と出力を制御するための電源電圧を生成するために広く使用されています。 三角波と基準正弦波の位相差を比較することで、各瞬間のパルス信号の幅を決定します。 位相差の大きさを調整することにより、出力電圧の正確な調整を実現できます。 SPWM 変調技術には、出力波形の品質が良く、高調波成分が少ないという利点があり、高精度の電力制御システムで広く使用されています。 SPWM 変調の正弦波半波波形を図 2 に示します。

図 2 SPWM 変調された正弦波半波
SPWM テクノロジーには次の利点があります。
高い出力波形品質: SPWM テクノロジーは、高調波成分が低く、波形品質が向上した、正弦波に似た出力波形を生成できます。 これにより、モーターやその他の機器の高調波損失が軽減され、システムの効率と安定性が向上します。
高い制御精度:SPWMテクノロジーにより、モーター出力信号の正確な制御を実現できます。 基準正弦波と三角波の位相差を調整することで、各パルスの幅を微調整することができ、モーターの速度やトルクの精密な調整を実現します。
低騒音:SPWM技術により滑らかな出力波形を生成できるため、モーター動作時の騒音が低くなります。 これは、オーディオ機器や精密機器など、高いノイズ要件が必要なアプリケーションにとって非常に重要です。
SPWM テクノロジーには多くの利点がありますが、いくつかの制限があります。
システムの複雑さ: SPWM テクノロジは、基準正弦波と三角波を生成し、位相差の比較とパルス幅調整を実行する必要があります。 これには複雑な回路とアルゴリズムが必要となり、システムの複雑さとコストが増加します。
高調波の問題: SPWM テクノロジーにより高調波成分を低減できますが、低周波高調波が依然として存在する可能性があります。 これには、高調波の影響を軽減するためのフィルタリングやその他の補償手段が必要です。
スイッチング デバイスに対する高い要件: SPWM テクノロジーは、スイッチング デバイスを使用してパルス幅調整を実現します。そのため、スイッチング デバイスには高速なスイッチング速度と低いスイッチング損失が必要です。
周波数変換技術にPWM変調技術とSPWM変調技術を応用することで、モーターの精密な制御を実現し、システムの効率と信頼性を向上させます。 これらの技術の応用は、家庭用エアコンやエレベーター、給水ポンプなど日常生活で重要な役割を果たしているだけでなく、産業分野でも生産効率の向上を推進しています。 例えば、工業生産においては、PWM変調技術やSPWM変調技術を応用することで、モータのソフトスタートやソフトストップを実現し、機械的衝撃を軽減し、機器の寿命を延ばすことができます。 同時に、正確なモーター制御により、プロセスの精度と安定性が向上し、製品の品質が向上します。
Ebyte は、IoT、インテリジェンス、自動化の開発を日々強力に支援し、リソース利用率を向上させ、より多くの製品とより多くの情報を提供することに取り組んでいます。興味のあるパートナーは、当社の公式 Web サイト http://www.es-ebyte.com にログオンできます。 さらに詳しく知りたい方は、オンラインでご質問にお答えいたします。
まず、PWM 変調技術を見てみましょう。 PWM変調技術は、パルス信号の幅を制御することで出力電圧の調整を実現します。 周波数変換技術では、PWM はモーターの速度とトルク出力を制御する周波数コンバーターで広く使用されています。 パルス信号のデューティ比(パルス幅と周期の比)を変更することで、モーターを正確に制御できます。 出力電圧を上げる必要がある場合はパルス信号の幅を広げ、出力電圧を下げる必要がある場合はパルス信号の幅を狭くします。 このようにして、モーターはさまざまな負荷条件下でも安定した速度とトルク出力を維持できます。 同時に、PWM変調技術は高速応答、高制御精度、高効率という利点もあり、さまざまな電力制御システムに広く使用されています。 PWM 変調波形を図 1 に示します。

図1 PWM変調波形
PWM テクノロジーには次の利点があります。
効率:PWM技術はパルス幅を調整することでモーターの出力電圧と周波数を制御できるため、さまざまな負荷条件下でもモーターの高効率動作を実現できます。 PWM テクノロジーは、モーターの定格電圧を下げることにより、モーターの消費電力を削減し、全体の効率を向上させることができます。
正確な制御:PWMテクノロジーは、高速応答と高い制御精度の特徴を持っています。 パルス幅と周期を微調整することで、さまざまなアプリケーションのニーズを満たすモーター速度とトルクの正確な調整を実現できます。
機械的衝撃の軽減: PWM テクノロジーはモーターのソフトスタートとソフトストップを実現し、機械システムの衝撃と摩耗を軽減し、機器の耐用年数を延ばします。
PWM テクノロジーには多くの利点がありますが、いくつかの制限があります。
高調波の問題: PWM テクノロジーでは、パルス信号を生成するときに高調波成分が発生し、電力ネットワークやその他の機器に干渉を引き起こす可能性があります。 高調波を低減するには、フィルタリングと抑制措置を講じる必要があり、システムの複雑さとコストが増加します。
スイッチング損失: PWM テクノロジーでは高周波スイッチング デバイスが使用されており、スイッチが頻繁に動作するとスイッチング損失が発生します。 これらの損失は熱エネルギーに変換されるため、回路を冷却するには適切な冷却システムが必要です。
EMI 干渉: 高周波スイッチング動作により、PWM テクノロジーは電磁干渉 (EMI) を生成し、周囲の電子機器や無線通信システムに干渉を引き起こす可能性があります。
もう 1 つの一般的な変調技術は SPWM 変調技術です。 SPWM 変調技術は、三角波と、必要な出力正弦波に類似した基準正弦波を生成することにより、電圧の変調を実現します。 周波数コンバータでは、SPWM 変調技術は、モータの速度と出力を制御するための電源電圧を生成するために広く使用されています。 三角波と基準正弦波の位相差を比較することで、各瞬間のパルス信号の幅を決定します。 位相差の大きさを調整することにより、出力電圧の正確な調整を実現できます。 SPWM 変調技術には、出力波形の品質が良く、高調波成分が少ないという利点があり、高精度の電力制御システムで広く使用されています。 SPWM 変調の正弦波半波波形を図 2 に示します。

図 2 SPWM 変調された正弦波半波
SPWM テクノロジーには次の利点があります。
高い出力波形品質: SPWM テクノロジーは、高調波成分が低く、波形品質が向上した、正弦波に似た出力波形を生成できます。 これにより、モーターやその他の機器の高調波損失が軽減され、システムの効率と安定性が向上します。
高い制御精度:SPWMテクノロジーにより、モーター出力信号の正確な制御を実現できます。 基準正弦波と三角波の位相差を調整することで、各パルスの幅を微調整することができ、モーターの速度やトルクの精密な調整を実現します。
低騒音:SPWM技術により滑らかな出力波形を生成できるため、モーター動作時の騒音が低くなります。 これは、オーディオ機器や精密機器など、高いノイズ要件が必要なアプリケーションにとって非常に重要です。
SPWM テクノロジーには多くの利点がありますが、いくつかの制限があります。
システムの複雑さ: SPWM テクノロジは、基準正弦波と三角波を生成し、位相差の比較とパルス幅調整を実行する必要があります。 これには複雑な回路とアルゴリズムが必要となり、システムの複雑さとコストが増加します。
高調波の問題: SPWM テクノロジーにより高調波成分を低減できますが、低周波高調波が依然として存在する可能性があります。 これには、高調波の影響を軽減するためのフィルタリングやその他の補償手段が必要です。
スイッチング デバイスに対する高い要件: SPWM テクノロジーは、スイッチング デバイスを使用してパルス幅調整を実現します。そのため、スイッチング デバイスには高速なスイッチング速度と低いスイッチング損失が必要です。
周波数変換技術にPWM変調技術とSPWM変調技術を応用することで、モーターの精密な制御を実現し、システムの効率と信頼性を向上させます。 これらの技術の応用は、家庭用エアコンやエレベーター、給水ポンプなど日常生活で重要な役割を果たしているだけでなく、産業分野でも生産効率の向上を推進しています。 例えば、工業生産においては、PWM変調技術やSPWM変調技術を応用することで、モータのソフトスタートやソフトストップを実現し、機械的衝撃を軽減し、機器の寿命を延ばすことができます。 同時に、正確なモーター制御により、プロセスの精度と安定性が向上し、製品の品質が向上します。
Ebyte は、IoT、インテリジェンス、自動化の開発を日々強力に支援し、リソース利用率を向上させ、より多くの製品とより多くの情報を提供することに取り組んでいます。興味のあるパートナーは、当社の公式 Web サイト http://www.es-ebyte.com にログオンできます。 さらに詳しく知りたい方は、オンラインでご質問にお答えいたします。
LoRaの特徴とメリットは?
2023年06月15日
Low Power Wide Area Network (略して LPWAN)、つまり低電力広域ネットワークは主にデバイス間の通信に使用され、この通信技術はネットワーク カバレッジが広く、端末の消費電力が低いという特徴を持っており、より適しています。特に NB-IoT、LoRa、Sigfox、eMTC などの大規模な IoT アプリケーションの導入に適しており、特に NB-IoT と LoRa は近年広く求められています。
この号では、広く使用されているテクノロジー、LoRa について説明します。 (NB-IoTについては次回紹介します)
LoRa は、スペクトラム拡散技術に基づいた長距離無線伝送技術であり、多くの LPWAN 通信技術の 1 つでもあり、米国の Semtech 社によって初めて採用および推進されました。 このソリューションは、長距離かつ低消費電力を実現できるシンプルな無線通信方式をユーザーに提供します。 現在、LoRa は主に 433、868、915 MHz などの ISM 周波数帯域で動作します。 LoRa無線伝送技術は、低消費電力の広域ネットワーク通信技術として、通信周波数の距離が強く、同じ消費電力で伝送距離が長いという利点があり、通信距離は従来の無線技術の3~5倍です。
Semtech は、ゲートウェイおよび端末用のさまざまなタイプの LoRa チップを含む、LoRa テクノロジーに基づいた LoRa 通信チップ ソリューションの完全なセットを開発しました。 他の企業の LoRa エコロジーへの参加を促進するために、Semtech は 2015 年 3 月に Actility、Cisco、IBM およびその他のメーカーと提携して LoRa Alliance の設立を共同で開始し、継続的に反復される LoRaWAN 仕様を開始しました。世界中の1,000社近くの企業がネットワークに接続し、各メーカーがサポートする広域ネットワーク標準体系が幅広い産業エコロジーを形成しています。
LoRa アライアンス
代表的なスペクトラム拡散方式には、直接拡散方式と周波数ホッピング方式があります。 LoRa テクノロジーは、直接拡散スペクトルに基づく変調方式です。 ダイレクト シーケンス スペクトラム拡散 (DSSS) は、直接拡散 (DS) と呼ばれ、広く使用されているスペクトラム拡散方式です。
LoRaの基本的なテクニカル指標:
伝送距離:市街地で最大2~5km、郊外で最大15km。
動作周波数:ISM周波数帯域には433MHz、470MHz、868MHz、915MHzなどが含まれます。
規格:IEEE 802.15.4g、LoRaWAN。
スペクトル拡散技術に基づいた CSS の変種には、前方誤り訂正 (Forward Error Correction、FEC) 機能があり、これは Semtech の非公開特許技術に属します。
容量: LoRa ゲートウェイは数千の LoRa ノードを接続できます。
バッテリー寿命: 最大 10 年。
セキュリティ: AES128 暗号化。
伝送速度: 18b/s~62.5kb/s。
LoRa には次の利点があります。
01低消費電力
LoRa アプリケーションは一般に IoT デバイスであり、通常はバッテリーで駆動され、数年以上使用されるため、LoRa の消費電力が極めて低いことが求められます。 LoRa の低消費電力の実現は、主に 2 つの側面によって決定されます: 一方で、チップの低消費電力化が必要であること、他方で、ソフトウェア通信プロトコルの低消費電力化も必要であることです。
まず、LoRa のハードウェア消費電力は非常に低く、たとえば、SX126X シリーズのホット スタート スリープ モードの電流はわずか 1.2uA、125kHz での受信電流は 4.6mA、17dBm 電力での送信電流はわずかです58mA。
次に、ソフトウェア通信プロトコルに関しては、LoRa には他の無線技術のような複雑な通信プロトコルがなく、データ パケットが非常にシンプルであり、大量のハンドシェイク データを送信する必要がありません。 電力を節約するという目的を達成するために、業界では Wake on Radio (WOR) 方式が広く使用されています。
チップはウェイクアップ プリアンブルをリッスンするために定期的に受信 (RX) モードに入り、それ以外のときはスリープ (Sleep) モードになります。 WOR の受信電流は下図のようになりますが、ほとんどの時間はスリープ モードであり、受信モードで目覚める時間はごく一部であるため、全体の消費電力は非常に低くなります。 たとえば、Ebyte の E22 および E32 モジュールはすべて WOR 機能を備えており、低消費電力要件を十分に満たすことができます。
02 遠距離
無線通信では、通信距離を測定する基準はリンク バジェットであり、これは送信電力から感度を引いたものに等しくなります。 感度は負の数であり、感度が高いほど負の値も大きくなります。そのため、リンク バジェットを改善する方法は、送信電力を増やして感度を向上させることです。 しかし、送信電力は国や地域によって厳しい規定があり、通信距離を伸ばすには感度を上げるしかありません。 LoRa の感度は、BW=125kHz、SF=7 の場合 -123dBm に達し、BW=7.81kHz、SF=12 の場合、感度は -149.1dBm に達しました。 Bluetooth の感度は約 -90dbm、ZigBee は約 -85dBm であるため、LoRa の伝送距離は他の無線通信技術に比べてはるかに長くなります。 ただし、LoRa は感度と引き換えに帯域幅を使用するため、伝送速度が非常に遅くなります。そのため、LoRa は長距離、低速、少量のアプリケーションに適しています。
03 アンチジャミング
LoRa は長距離伝送を実現しますが、感度の利点に加えて、もう 1 つの非常に重要な要素は超耐干渉性能です。
LoRa は、ノイズが 20dB 未満の場合でも通信できますが、これは既存の従来の通信テクノロジーでは利用できません。
LoRa は通常、ノイズより 20dB 低い信号を復調できますが、FSK は理論的には確実に復調するにはノイズより 8dB 高い必要があります。 通信プロセスで外部の電磁信号干渉が発生した場合、従来のワイヤレス技術では通信できませんが、LoRa は安定した通信を継続できます。 したがって、チャネル干渉が深刻な一部の地域では、顧客は安定した通信のためのコア技術として LoRa テクノロジーを選択することになります。 LoRa 変調がこれほど強力な耐干渉能力を持つ理由は、主に、チャープ デバッグがコヒーレント復調中のノイズの下で有用な LoRa 信号を収集できるためであり、そのノイズはコヒーレント復調後もノイズのままであるためです。
2022 年には、世界中で 650 万台以上の LoRa ベースのゲートウェイと 2 億 8,000 万台以上の LoRa ベースのターミナル ノードが導入され、LoRaWAN 公衆ネットワーク オペレータは 170 社以上あり、その数は今も増え続けています。 ABI Research によると、2026 年までに、世界の非セルラー低電力ワイドエリア ネットワーク接続の 50% 以上が LoRa によって占められると予想されています。 国内の LoRa 産業チェーン企業の数は 3,000 社を超え、現在も急速に成長しています。 中国市場は、LoRa の世界的なエコロジー構築において非常に重要な部分です。
Ebyte は、IoT、インテリジェンス、自動化の開発を日々強力に支援し、リソース利用率を向上させ、より多くの製品とより多くの情報を提供することに取り組んでいます。興味のあるパートナーは、当社の公式 Web サイト http://www.es-ebyte.com にログオンできます。 さらに詳しく知りたい方は、オンラインでご質問にお答えいたします。
この号では、広く使用されているテクノロジー、LoRa について説明します。 (NB-IoTについては次回紹介します)
LoRa は、スペクトラム拡散技術に基づいた長距離無線伝送技術であり、多くの LPWAN 通信技術の 1 つでもあり、米国の Semtech 社によって初めて採用および推進されました。 このソリューションは、長距離かつ低消費電力を実現できるシンプルな無線通信方式をユーザーに提供します。 現在、LoRa は主に 433、868、915 MHz などの ISM 周波数帯域で動作します。 LoRa無線伝送技術は、低消費電力の広域ネットワーク通信技術として、通信周波数の距離が強く、同じ消費電力で伝送距離が長いという利点があり、通信距離は従来の無線技術の3~5倍です。
Semtech は、ゲートウェイおよび端末用のさまざまなタイプの LoRa チップを含む、LoRa テクノロジーに基づいた LoRa 通信チップ ソリューションの完全なセットを開発しました。 他の企業の LoRa エコロジーへの参加を促進するために、Semtech は 2015 年 3 月に Actility、Cisco、IBM およびその他のメーカーと提携して LoRa Alliance の設立を共同で開始し、継続的に反復される LoRaWAN 仕様を開始しました。世界中の1,000社近くの企業がネットワークに接続し、各メーカーがサポートする広域ネットワーク標準体系が幅広い産業エコロジーを形成しています。
LoRa アライアンス
代表的なスペクトラム拡散方式には、直接拡散方式と周波数ホッピング方式があります。 LoRa テクノロジーは、直接拡散スペクトルに基づく変調方式です。 ダイレクト シーケンス スペクトラム拡散 (DSSS) は、直接拡散 (DS) と呼ばれ、広く使用されているスペクトラム拡散方式です。
LoRaの基本的なテクニカル指標:
伝送距離:市街地で最大2~5km、郊外で最大15km。
動作周波数:ISM周波数帯域には433MHz、470MHz、868MHz、915MHzなどが含まれます。
規格:IEEE 802.15.4g、LoRaWAN。
スペクトル拡散技術に基づいた CSS の変種には、前方誤り訂正 (Forward Error Correction、FEC) 機能があり、これは Semtech の非公開特許技術に属します。
容量: LoRa ゲートウェイは数千の LoRa ノードを接続できます。
バッテリー寿命: 最大 10 年。
セキュリティ: AES128 暗号化。
伝送速度: 18b/s~62.5kb/s。
LoRa には次の利点があります。
01低消費電力
LoRa アプリケーションは一般に IoT デバイスであり、通常はバッテリーで駆動され、数年以上使用されるため、LoRa の消費電力が極めて低いことが求められます。 LoRa の低消費電力の実現は、主に 2 つの側面によって決定されます: 一方で、チップの低消費電力化が必要であること、他方で、ソフトウェア通信プロトコルの低消費電力化も必要であることです。
まず、LoRa のハードウェア消費電力は非常に低く、たとえば、SX126X シリーズのホット スタート スリープ モードの電流はわずか 1.2uA、125kHz での受信電流は 4.6mA、17dBm 電力での送信電流はわずかです58mA。
次に、ソフトウェア通信プロトコルに関しては、LoRa には他の無線技術のような複雑な通信プロトコルがなく、データ パケットが非常にシンプルであり、大量のハンドシェイク データを送信する必要がありません。 電力を節約するという目的を達成するために、業界では Wake on Radio (WOR) 方式が広く使用されています。
チップはウェイクアップ プリアンブルをリッスンするために定期的に受信 (RX) モードに入り、それ以外のときはスリープ (Sleep) モードになります。 WOR の受信電流は下図のようになりますが、ほとんどの時間はスリープ モードであり、受信モードで目覚める時間はごく一部であるため、全体の消費電力は非常に低くなります。 たとえば、Ebyte の E22 および E32 モジュールはすべて WOR 機能を備えており、低消費電力要件を十分に満たすことができます。
02 遠距離
無線通信では、通信距離を測定する基準はリンク バジェットであり、これは送信電力から感度を引いたものに等しくなります。 感度は負の数であり、感度が高いほど負の値も大きくなります。そのため、リンク バジェットを改善する方法は、送信電力を増やして感度を向上させることです。 しかし、送信電力は国や地域によって厳しい規定があり、通信距離を伸ばすには感度を上げるしかありません。 LoRa の感度は、BW=125kHz、SF=7 の場合 -123dBm に達し、BW=7.81kHz、SF=12 の場合、感度は -149.1dBm に達しました。 Bluetooth の感度は約 -90dbm、ZigBee は約 -85dBm であるため、LoRa の伝送距離は他の無線通信技術に比べてはるかに長くなります。 ただし、LoRa は感度と引き換えに帯域幅を使用するため、伝送速度が非常に遅くなります。そのため、LoRa は長距離、低速、少量のアプリケーションに適しています。
03 アンチジャミング
LoRa は長距離伝送を実現しますが、感度の利点に加えて、もう 1 つの非常に重要な要素は超耐干渉性能です。
LoRa は、ノイズが 20dB 未満の場合でも通信できますが、これは既存の従来の通信テクノロジーでは利用できません。
LoRa は通常、ノイズより 20dB 低い信号を復調できますが、FSK は理論的には確実に復調するにはノイズより 8dB 高い必要があります。 通信プロセスで外部の電磁信号干渉が発生した場合、従来のワイヤレス技術では通信できませんが、LoRa は安定した通信を継続できます。 したがって、チャネル干渉が深刻な一部の地域では、顧客は安定した通信のためのコア技術として LoRa テクノロジーを選択することになります。 LoRa 変調がこれほど強力な耐干渉能力を持つ理由は、主に、チャープ デバッグがコヒーレント復調中のノイズの下で有用な LoRa 信号を収集できるためであり、そのノイズはコヒーレント復調後もノイズのままであるためです。
2022 年には、世界中で 650 万台以上の LoRa ベースのゲートウェイと 2 億 8,000 万台以上の LoRa ベースのターミナル ノードが導入され、LoRaWAN 公衆ネットワーク オペレータは 170 社以上あり、その数は今も増え続けています。 ABI Research によると、2026 年までに、世界の非セルラー低電力ワイドエリア ネットワーク接続の 50% 以上が LoRa によって占められると予想されています。 国内の LoRa 産業チェーン企業の数は 3,000 社を超え、現在も急速に成長しています。 中国市場は、LoRa の世界的なエコロジー構築において非常に重要な部分です。
Ebyte は、IoT、インテリジェンス、自動化の開発を日々強力に支援し、リソース利用率を向上させ、より多くの製品とより多くの情報を提供することに取り組んでいます。興味のあるパートナーは、当社の公式 Web サイト http://www.es-ebyte.com にログオンできます。 さらに詳しく知りたい方は、オンラインでご質問にお答えいたします。
スマート養殖ソリューション
2023年06月08日
我が国の水・土壌浸食が深刻化し、土地資源不足が深刻化する中、養殖池がトレンドとなってきましたが、現代の気候の急激な変化や受益の減少により、どのように品質を向上させるかが課題となっています。水産養殖産物の生産量の増加は漁民の経済収入の増加に直結し、効率的で環境に優しく安全な現代的な水産養殖の実現は緊急に解決すべき大きな課題となっています。
手作業による観察を使用し、単に経験に頼って養殖する伝統的な大規模な養殖方法は、養殖の過程で時機を逸した規制を引き起こしやすく、「浮き頭」や広い範囲の死骸などの現象が非常に発生しやすく、結果的に経済的に大きな損失をもたらします。損失。
伝統的な養殖方法では、現代の水産養殖における正確さとインテリジェンスのニーズを満たすことができなくなりました。 我が国の養殖業の発展に伴い、養殖システムは供給側の構造改革を積極的に推進しています。
自然水域での漁業が完全に禁止されたことに伴い、多くの魚の養殖は池の養殖に変わっていますが、池の養殖と自然の流水の最も明らかな違いは、天然水の水の流れにより酸素含有量が大幅に増加することです。水の中にいますが、養魚池はよく停滞した水のプールであり、酸素含有量が満たされず、水中の酸素含有量が保証されないため、魚は低酸素症を引き起こし、重度の場合は死につながります。 従来の水と酸素の含有量は人間の判断に頼っていることが多く、直感的なデータ分析を行うことは不可能でした。
方法を改善する
①エアレーターで酸素を添加します。 モーターの回転に基づいて、水しぶきを反転させて水波や水流を形成し、水をかき混ぜるという目的を達成します。モーターが回転すると、水面に衝突して空気との接触面積が増加します。水域を汚染し、水中の酸素含有量をさらに増加させます。
②水中の酸素含有量の値は酸素センサーによって収集され、直感的な方法で表示され、人間の制御の不確実性を取り除き、いつ、どのくらいの時間酸素を追加すべきかを正確に知ることができ、より科学的で合理的です。
③リモコンスイッチにより、センサーの出力値を直接収集し、標準値に変換して携帯電話で直感的に表示でき、水の状態を携帯電話で遠隔から確認、設定することができます。水中の酸素濃度が5ppm未満になるとエアレーターが自動的にオンになり、8ppmに達すると自動的に閉じられ、精度と利便性の目的を達成するために手動制御が自動制御に置き換えられます。
システム構成
クラウドインテリジェントリモコンスイッチ+水中酸素濃度センサー+エアレーターを採用
ソリューションの利点
1. 低導入コスト、低メンテナンスコスト
2.遠隔収集、正確な判断、自動制御、リアルタイム閲覧
3. 簡単な設置、簡単なメンテナンス、便利な使用
4. 迅速な対応、高効率、自動化
関連製品
4G 携帯電話クラウド インテリジェント リモート コントロール スイッチ (C31 シリーズ) は、Ebyte Company によって設計および製造された 4G 携帯電話リモート コントロール スイッチ製品です。
Alibaba Cloudプラットフォームに基づいた産業グレードの標準設計を採用し、4Gネットワーク信号伝送を通じてデバイスの遠隔制御スイッチを実現します。
この製品は、4 ~ 20mA センサー (光、温度、湿度、重量など) に直接接続できる入力検出、停電アラームなどの機能をサポートしています。
データ カードが付属しており、ユーザーは生涯無料で使用できます。
手作業による観察を使用し、単に経験に頼って養殖する伝統的な大規模な養殖方法は、養殖の過程で時機を逸した規制を引き起こしやすく、「浮き頭」や広い範囲の死骸などの現象が非常に発生しやすく、結果的に経済的に大きな損失をもたらします。損失。
伝統的な養殖方法では、現代の水産養殖における正確さとインテリジェンスのニーズを満たすことができなくなりました。 我が国の養殖業の発展に伴い、養殖システムは供給側の構造改革を積極的に推進しています。
自然水域での漁業が完全に禁止されたことに伴い、多くの魚の養殖は池の養殖に変わっていますが、池の養殖と自然の流水の最も明らかな違いは、天然水の水の流れにより酸素含有量が大幅に増加することです。水の中にいますが、養魚池はよく停滞した水のプールであり、酸素含有量が満たされず、水中の酸素含有量が保証されないため、魚は低酸素症を引き起こし、重度の場合は死につながります。 従来の水と酸素の含有量は人間の判断に頼っていることが多く、直感的なデータ分析を行うことは不可能でした。
方法を改善する
①エアレーターで酸素を添加します。 モーターの回転に基づいて、水しぶきを反転させて水波や水流を形成し、水をかき混ぜるという目的を達成します。モーターが回転すると、水面に衝突して空気との接触面積が増加します。水域を汚染し、水中の酸素含有量をさらに増加させます。
②水中の酸素含有量の値は酸素センサーによって収集され、直感的な方法で表示され、人間の制御の不確実性を取り除き、いつ、どのくらいの時間酸素を追加すべきかを正確に知ることができ、より科学的で合理的です。
③リモコンスイッチにより、センサーの出力値を直接収集し、標準値に変換して携帯電話で直感的に表示でき、水の状態を携帯電話で遠隔から確認、設定することができます。水中の酸素濃度が5ppm未満になるとエアレーターが自動的にオンになり、8ppmに達すると自動的に閉じられ、精度と利便性の目的を達成するために手動制御が自動制御に置き換えられます。
システム構成
クラウドインテリジェントリモコンスイッチ+水中酸素濃度センサー+エアレーターを採用
ソリューションの利点
1. 低導入コスト、低メンテナンスコスト
2.遠隔収集、正確な判断、自動制御、リアルタイム閲覧
3. 簡単な設置、簡単なメンテナンス、便利な使用
4. 迅速な対応、高効率、自動化
関連製品
4G 携帯電話クラウド インテリジェント リモート コントロール スイッチ (C31 シリーズ) は、Ebyte Company によって設計および製造された 4G 携帯電話リモート コントロール スイッチ製品です。
Alibaba Cloudプラットフォームに基づいた産業グレードの標準設計を採用し、4Gネットワーク信号伝送を通じてデバイスの遠隔制御スイッチを実現します。
この製品は、4 ~ 20mA センサー (光、温度、湿度、重量など) に直接接続できる入力検出、停電アラームなどの機能をサポートしています。
データ カードが付属しており、ユーザーは生涯無料で使用できます。
https://www.es-ebyte.com/
| S | M | T | W | T | F | S |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | |
| 7 | 8 | 9 | 10 | 11 | 12 | 13 |
| 14 | 15 | 16 | 17 | 18 | 19 | 20 |
| 21 | 22 | 23 | 24 | 25 | 26 | 27 |
| 28 | 29 | 30 |
プロフィール

spimodule
ブログ内検索
最近の記事
Tecnología LPWAN: conozca a LoRa (10/18)
Modbusゲートウェイとは何ですか (6/28)
光通信の歴史 (6/26)
周波数変換技術 (6/19)
LoRaの特徴とメリットは? (6/15)
スマート養殖ソリューション (6/8)